

Deformation control and thrust analysis of a flexible fishtail with muscle-like actuation
IEEE Transactions on Robotics (TRO), 41, 159-179, 2025
Paper / 中文介绍
IEEE Transactions on Robotics (TRO), 41, 159-179, 2025
Paper / 中文介绍

USIM and U0: A vision-language-action dataset and model for general underwater robots
arXiv preprint arXiv:2510.07869, 2025
Paper / Project Page
arXiv preprint arXiv:2510.07869, 2025
Paper / Project Page


Learning to turn: Deformation control of a novel flexible fishtail actuated by artificial muscles
2024 IEEE International Conference on Cyborg and Bionic Systems (CBS), 171-176
Paper
2024 IEEE International Conference on Cyborg and Bionic Systems (CBS), 171-176
Paper

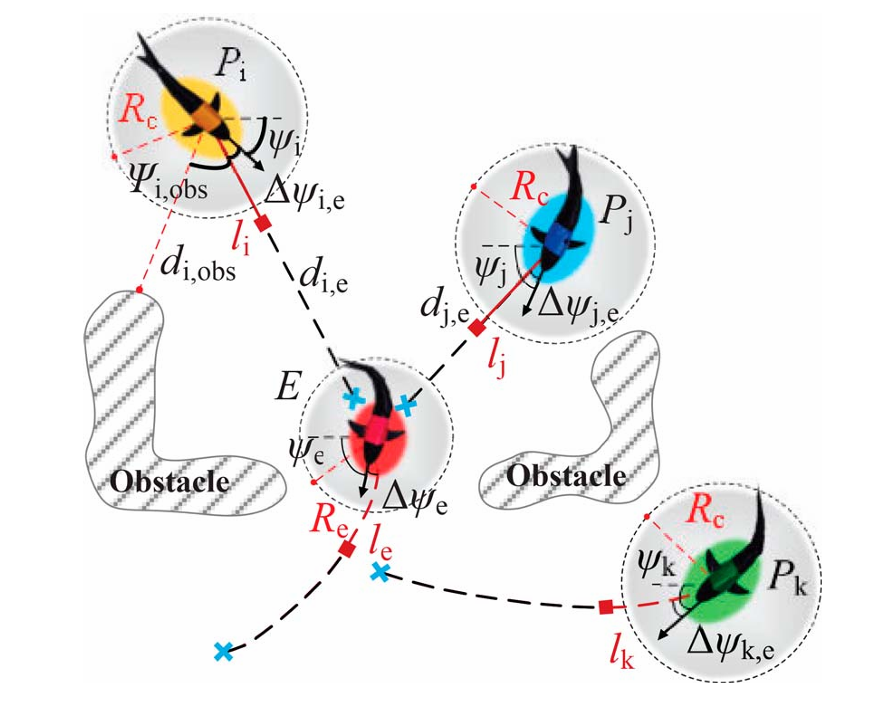
Decentralized multirobotic fish pursuit control with attraction-enhanced reinforcement learning
IEEE Transactions on Industrial Electronics (TIE), 72 (8), 8290-8300, 2025
Paper
IEEE Transactions on Industrial Electronics (TIE), 72 (8), 8290-8300, 2025
Paper

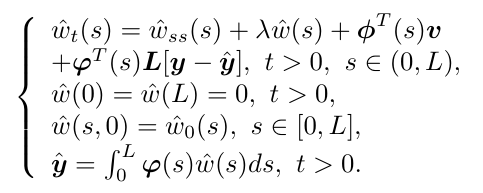
Observer-based feedback control for linear parabolic PDEs with quantized input
2021 8th International Conference on Information, Cybernetics, and Computational Social Systems (ICCSS)
Paper
2021 8th International Conference on Information, Cybernetics, and Computational Social Systems (ICCSS)
Paper